§ 6. РАВНОМЕРНОЕ ДВИЖЕНИЕ ПО ОКРУЖНОСТИ: ЦЕНТРОСТРЕМИТЕЛЬНОЕ УСКОРЕНИЕ.
Вектор скорости тела, движущегося по окружности,
непрерывно изменяет своё направление, и поэтому такое движение является ускоренным.
Любое движение по
криволинейной траектории происходит с ускорением, так как вектор скорости,
направленный по касательной к траектории, меняет своё направление со временем. Примерами
криволинейного движения могут служить движение планет вокруг Солнца и электронов
вокруг атомного ядра. По криволинейной траектории движется автомобиль,
поворачивающий на перекрёстке, и самолёт, заходящий на посадку.
Простейшим криволинейным
движением является равномерное движение по окружности, при котором
модуль скорости остаётся постоянным, а его направление меняется. Чтобы найти
величину и направление вектора ускорения при равномерном движении по окружности
с центром в точке О, отметим на ней две близко
расположенные точки A и B (см. верх рис. 6, слева). Пусть, в точке А тело было в момент времени t, а в точке В – в момент
времени t+Dt. На том же рисунке выходящими из
точек А и В нарисованы векторы vA и vB, соответствующие скоростям тела в
данных точках.
Ускорение a, как известно (см. § 4), равно
отношению изменения вектора скорости Dv, произошедшего за интервал времени Dt, к величине этого интервала, откуда следует, что Dv =a.Dt. В нашем случае Dv = vA - vB. Справа вверху на рис.6 показано,
как, используя правило треугольника, найти Dv по известным vA и vB. При сближении точек Б и А направление ![]() приближается к направлению,
перпендикулярному к
приближается к направлению,
перпендикулярному к ![]() , а значит
, а значит ![]() становится направленным
к центру окружности, по которой движется тело. Такое движение называют движением
с центростремительным ускорением.
становится направленным
к центру окружности, по которой движется тело. Такое движение называют движением
с центростремительным ускорением.
Так как vA и vB перпендикулярны ОА и ОВ,
соответственно, а модули vA и vB равны между собой, то треугольники ОАВ
и О’A’B’ подобны, как равнобедренные треугольники с равными углами
(см. верх рис.6). Поэтому справедливо следующее отношение между длинами сторон
этих треугольников:
![]()
Для близко расположенных точек А и В длину отрезка АВ можно считать равной
длине соответствующей дуги АВ окружности, а длина этой дуги окружности
равна произведению модуля скорости, v на Dt. Подставляя в (6.1) A’B’ =
a.Dt , АВ = v.Dt, О’A’ = v, ОА = R (радиус окружности), получаем после несложных
преобразований следующее выражение для величины центростремительного ускорения:
![]()
Любое криволинейное движение на
коротких участках траектории всегда можно рассматривать как движение по малой
дуге окружности с радиусом, более всего подходящим для данного участка
траектории (см. R1,
R2 и R3 в нижней части рис.6). Этот радиус называют радиусом
кривизны траектории в данной её точке. Если тело движется равномерно
(модуль скорости, v не изменяется) по криволинейной траектории, то по
формуле 6.2 и известным радиусам кривизны можно вычислить центростремительное
ускорение, направленное к центру кривизны траектории в любой её точке.
Так как вектор
центростремительного ускорения всегда направлен перпендикулярно касательной к
траектории, то направление вектора ускорения при криволинейном движении никогда
не совпадает с направлением касательной к траектории. Поэтому вектор ускорения в
этих случаях представляют в виде суммы двух взаимно перпендикулярных составляющих:
тангенциальной, aт (направленной по касательной к траектории) и нормальной,
aн (направленной перпендикулярно к касательной). При этом aт
соответствует изменению модуля скорости движения, а aн – изменению направления его вектора.
Вопросы для
повторения:
·
Куда направлено центростремительное ускорение, и как оно
зависит от скорости и радиуса окружности?
·
Чему равны модули тангенциального и нормального ускорения при
равномерном движении по окружности?
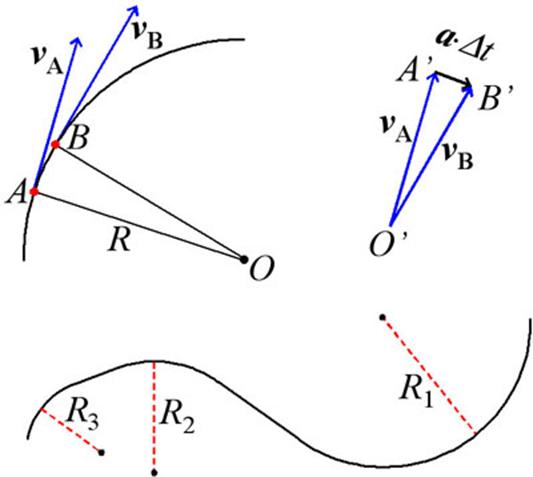
Рис. 6.
Верх – к выводу формулы для центростремительного ускорения; низ – криволинейная
траектория, несколько участков которой можно заменить
дугами окружностей обозначенных радиусов.